炫酷实用全部满分!高德地图「车道级导航」的设计探索

扫一扫 
扫一扫 
扫一扫 
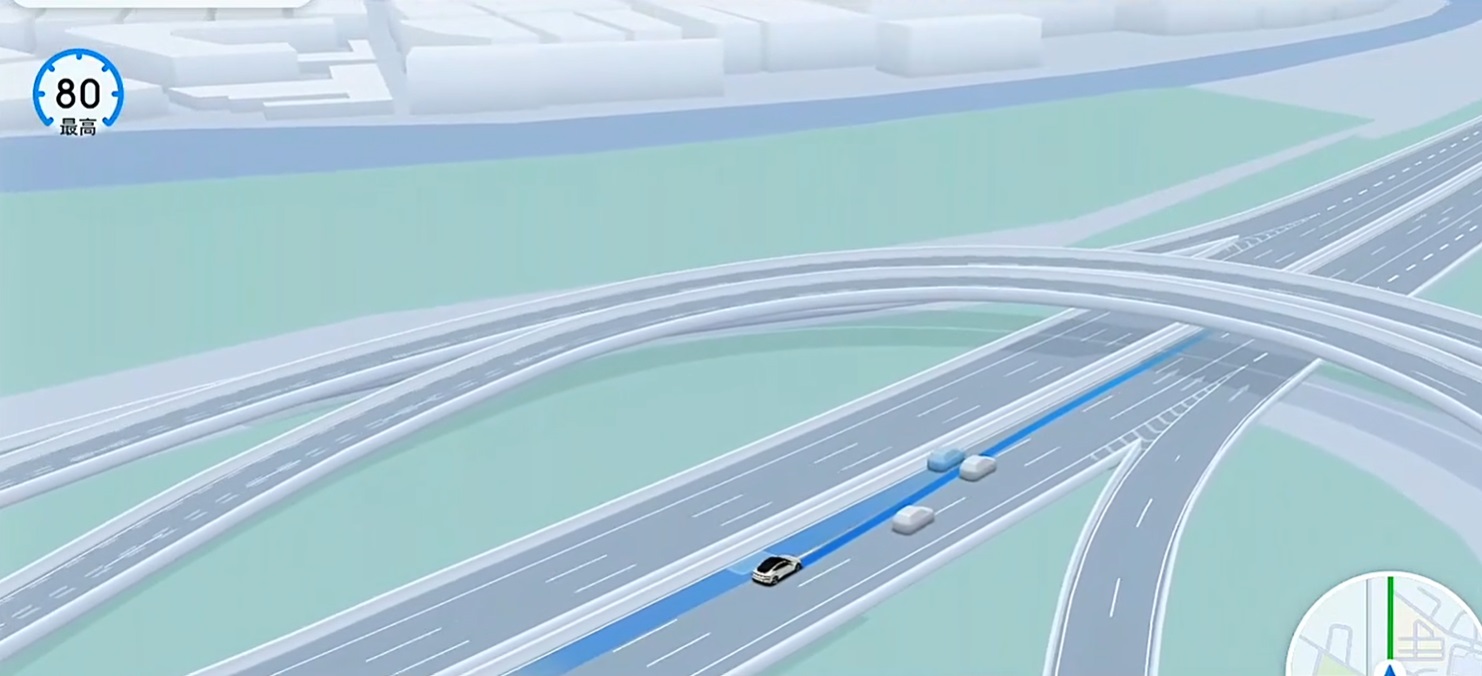
扫一扫 背景相信很多人在开车时都用过手机或车机上的地图导航,而今天 Alibaba Design 想和大家分享的就是大家常用的地图导航的换代升级版——车道级导航。 先来说说车道级导航有哪些不一样。相比于传统地图,车道级地图导航在信息精细度、定位准确性、动态信息丰富度上有大幅提升。比如,车道级导航能清晰显示道路上的虚实标线、自己的车行驶在哪条车道上,还能在地图上看到车身摄像头和雷达检测到的周围车辆、锥桶、防撞桶等。
车道级导航在智能汽车的驾驶场景中,有两方面的用户价值:
目前,高德已经发布搭载了车道级导航能力的量产产品——高德第三代车载导航,已在小鹏P7车型的NGP*自动导航辅助驾驶系统中落地。 *NGP 是高级智能辅助驾驶系统,可以在全中国大部分高快速道路上进行自主并线、超车、驶入匝道等。
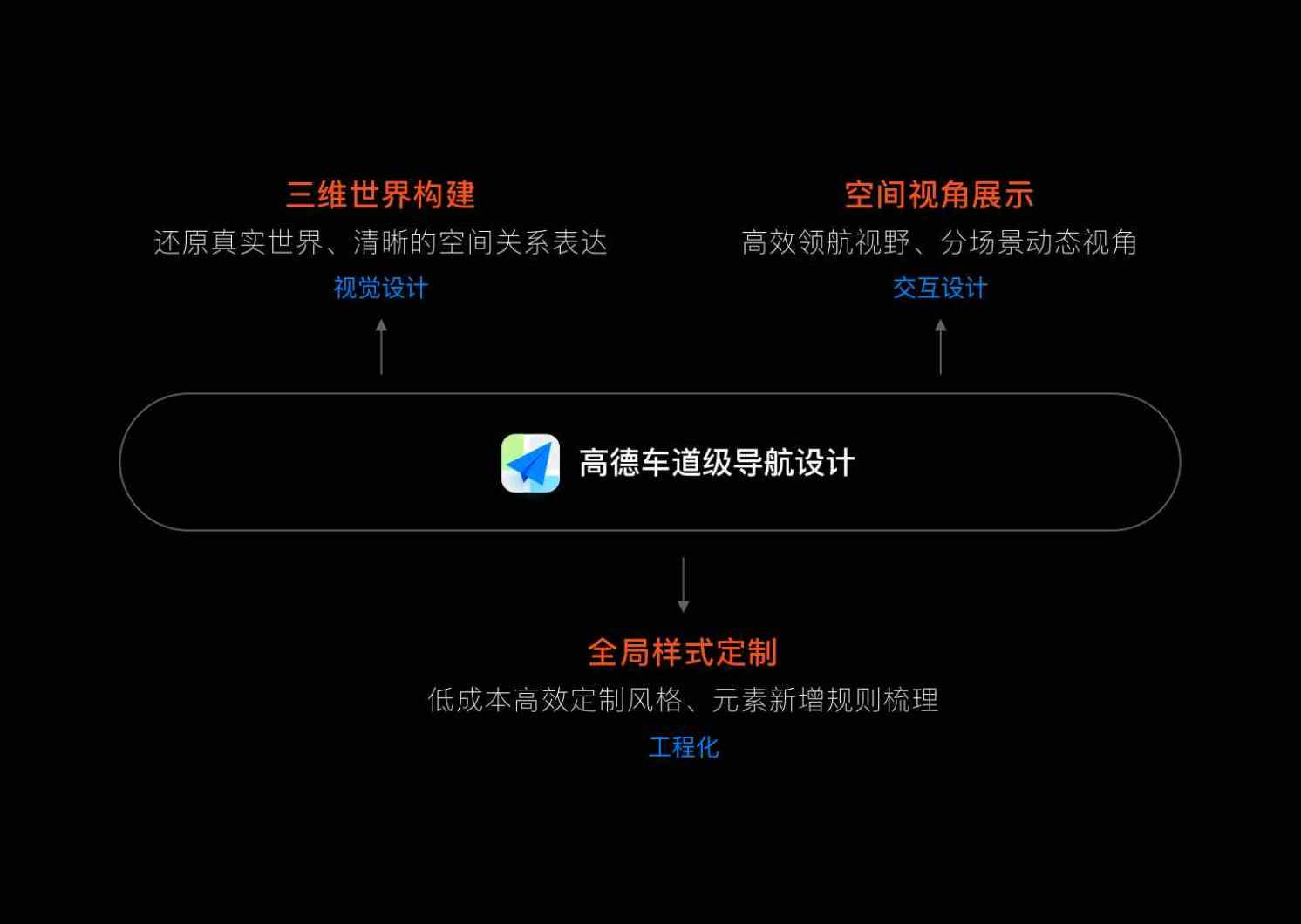
车道级地图导航承载的信息与传统地图有明显差异,如何将这些信息加工转化为愉悦的驾驶体验,就是设计师要解决的问题了。下面分享一些我们在车道级导航设计中的思考。 车道级地图导航的体验设计框架车道级导航应用于智能汽车的人车共驾场景,需要同时考虑用户的驾乘体验和车企客户的设计定制诉求。包含三部分内容:
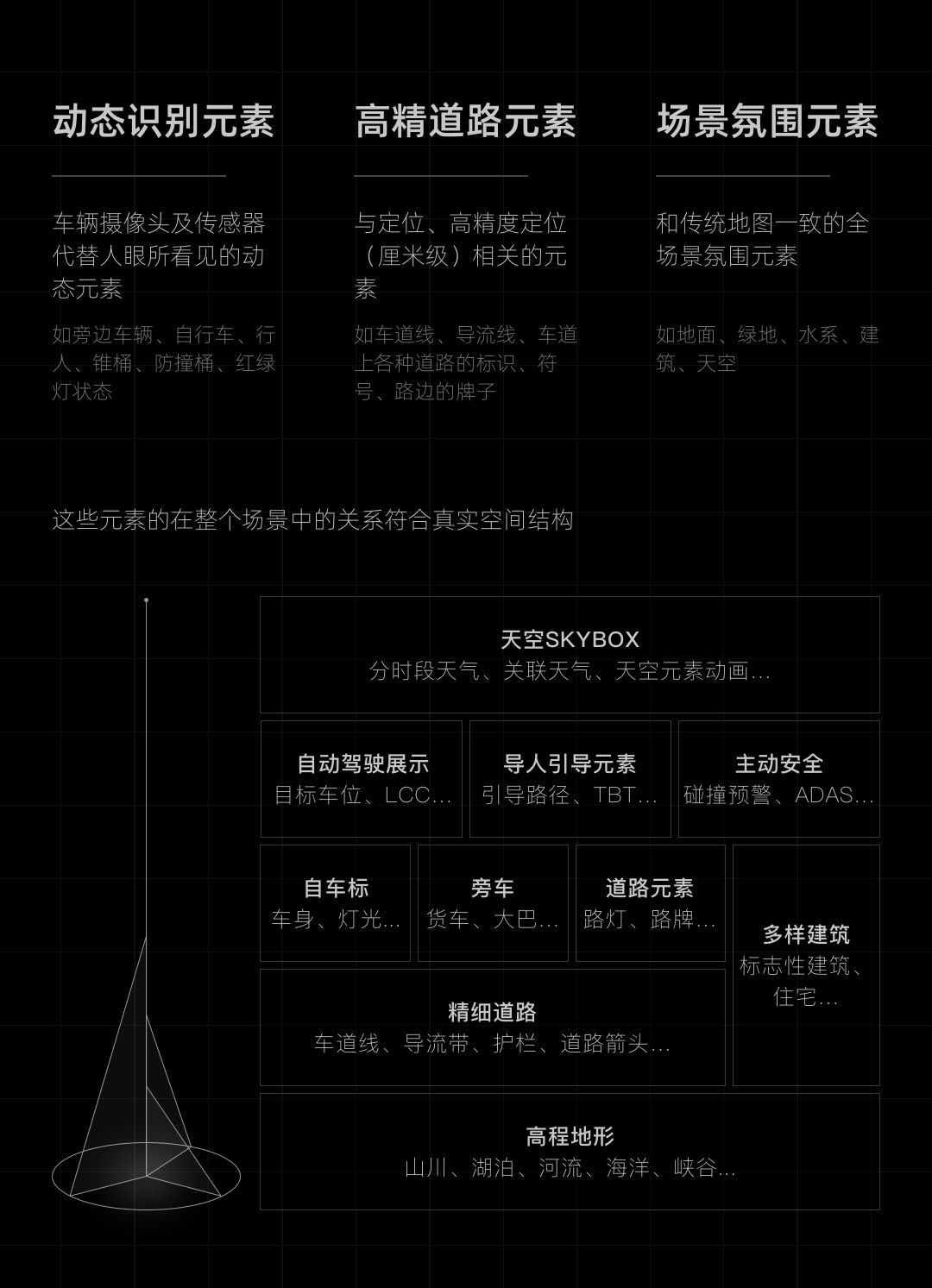
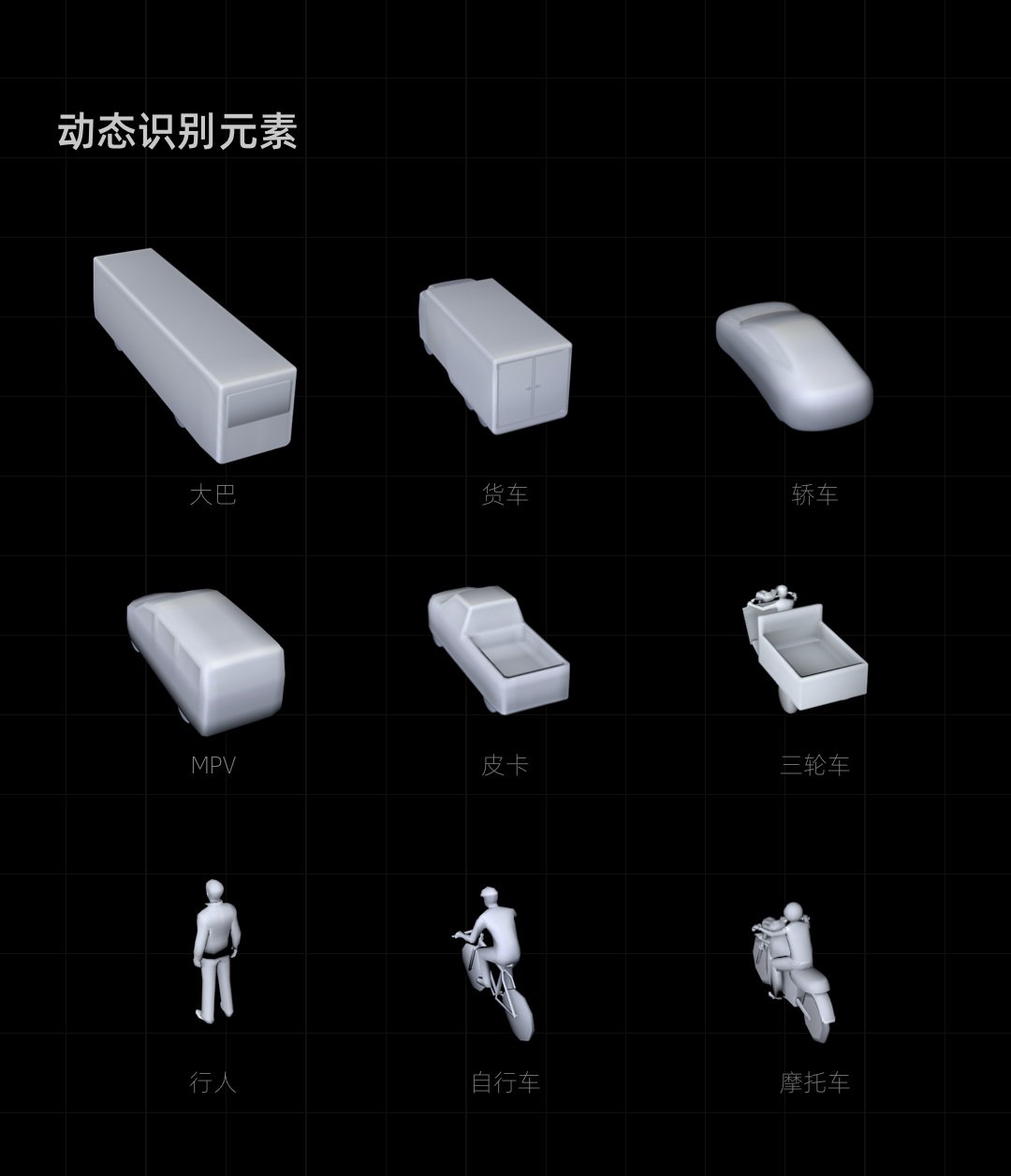
1. 三维世界构建车道级地图中所呈现的数据元素对比普通地图更多更复杂,而且在不断采集更新中,但大致能划分为三类:动态识别元素、高精道路元素以及场景氛围元素,如下图所示。
我们要做的设计,就是将以上这些数据元素以三维视觉化的方式进行呈现,最终服务于驾驶场景中的驾驶者。我们总结了几个重要的构建原则: 「 清晰的空间关系展示 」 数字地图的优势在于能清晰展示复杂世界的空间结构、空间关系。空间关系的清晰表达能让驾驶者更了解当前所处道路环境,心里更有底,这对于开启自动驾驶的车辆尤为重要。
空间关系表达的关键在于表现道路的上下层级和联通关系、坡度变化,加上仿真的车辆及视角变化,实现高架穿桥而过、相机视角由远及近的场景展示。
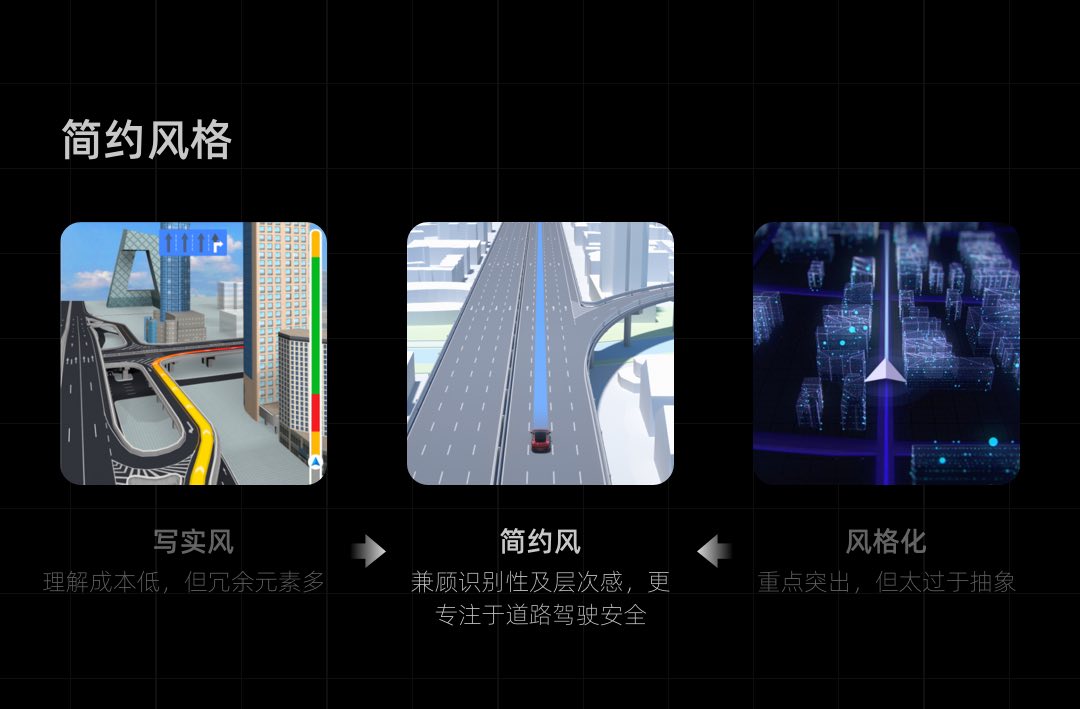
空间关系表达的另一重点在于道路与周围环境的关系,比如道路与山脉,通过高精地图可以看到远方道路的弯曲路形,提前减速,提升山路驾驶安全性。 「 简约元素风格提炼 」 地图设计时整体风格选择需要克制,既要保证地图中各元素之间的区隔度,又要保证地图整体与上层业务组件拉开视觉层级。这样才能更好的突出当前需要驾驶者注意的重点元素,提升整体的信息传达效率和体验。 既要让驾驶者能快速识别地图中的元素是什么,又需要让画面整体有序,主次明确。所以我们使用介于写实与抽象风格之间的简约风格,既能写实展示元素的关键特征,整体又不复杂。
对于单个元素的设计上,主要是通过元素现实中的关键特征提取,去掉一些不影响认知的细节,让驾驶者一眼就能明确这个元素是什么。
「 动静风格统一 」 静态元素是由高精地图生成,而运动元素则是车辆传感器识别的车辆、交通设施等。地图上的这些元素的仿真表达,能够反应车周围的实时动态环境信息,增强驾驶者对车辆感知能力的信任。 对于这些动态识别元素,我们推荐客户在设计风格上与地图相呼应,在保证识别性的前提下,两者风格尽量统一,形成整体感。 下面是客户设计团队制作的动态元素模型:
对于行人、自行车等出现人体的元素,我们通过循环的骨骼动画原地播放,以及传感器确定的运动轨迹,来模拟对应的人体运动。
2. 空间视角展示地图画面是由渲染引擎程序的摄像机拍摄出来的。摄像机的位置、俯仰角、投影中心、裁剪区域等都会影响用户看到的画面内容。 「 远近兼顾的视野 」 为了让驾驶者有全局的掌控感,车道级地图的摄像机视野需要兼顾眼前和远方的信息呈现。在地图上既可以看清眼前的车道标线、周围的车辆,又可以看到 500 米甚至一公里后的路形变化、高速出口等。
「 自动驾驶动态视角 」 我们与客户设计团队一起,对自动驾驶场景拆分做了多次讨论,最后决定对车速和并线这两个变量设计动态视角。 在自动驾驶场景中,摄影机与自车的距离会随着车速大小在一定范围内变化。当车速较慢时,拉近摄影机与自车的距离,以强化显示自车周围的动态信息。当车速较快时,拉远摄影机与自车的距离,获得更远的视野和足够的预判时间。
自动驾驶的关键场景是车辆自动并线。为了强化驾驶者对车辆并线决策的感知,在汽车进入并线等待状态时,相机的投射中心会移动到目标车位。
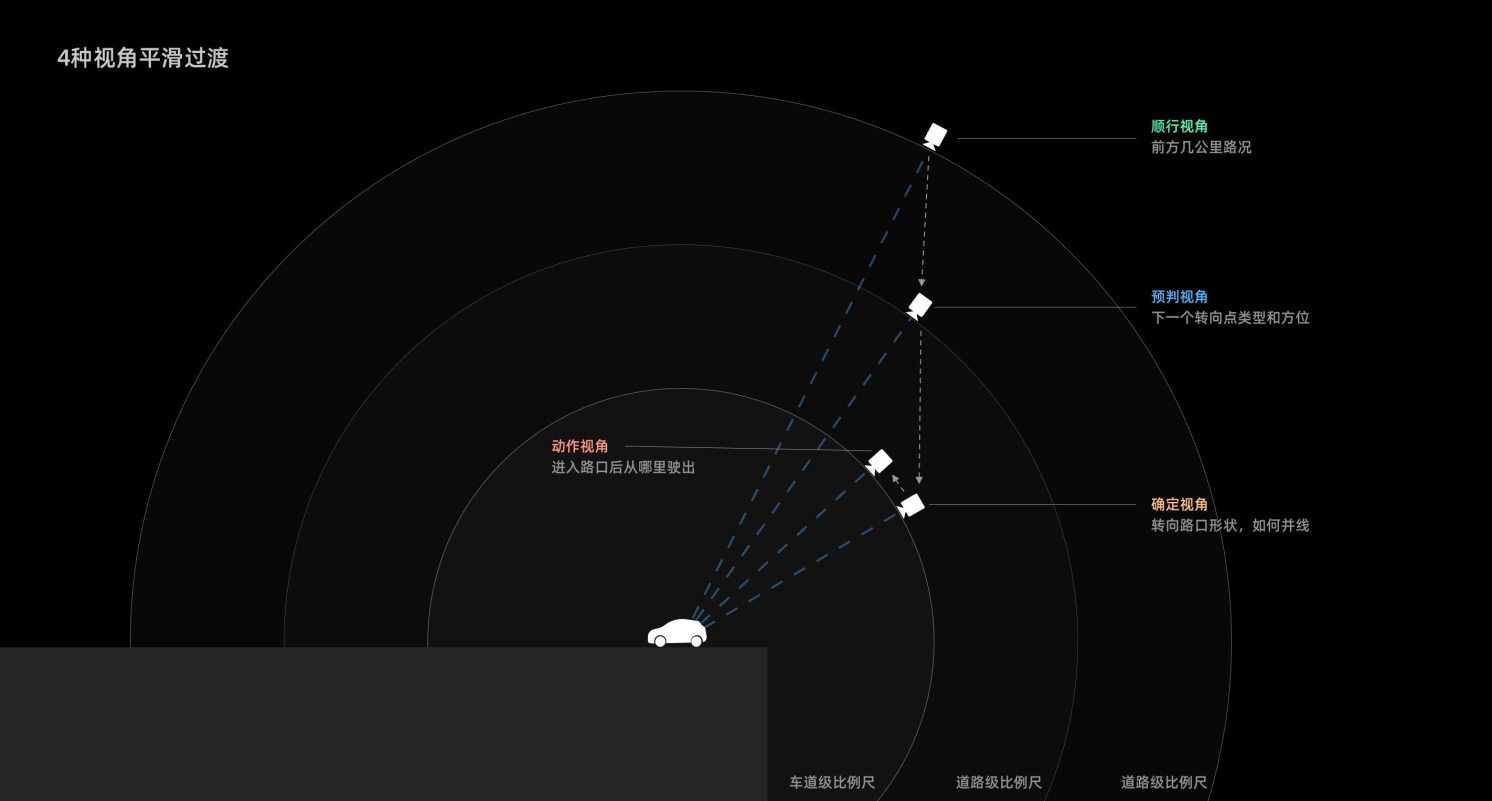
「 车道级导航动态视角 」 与自动驾驶相对的是人驾驶的场景。按与下一个转向路口的距离远近,人在驾车导航时可抽象为 4 个阶段:顺行、预判、确定、动作。
不同的驾驶阶段需要不同的摄像机视角,来强调最相关的信息。例如:当下一个转弯路口在几公里以后时,驾驶员对几公里范围内路况的需求要强于对前方路口位置的需求;当临近路口时,驾驶员对前方从哪里转弯、走哪条车道的需求又会强于对几公里后路况的需求。
下面详细介绍一下临近路口时,摄像机视角的动态过渡策略: 过程 1:根据用户位置和交通情况,提示用户并线,此时将摄像机拉近,画面从 2D 地图视野平滑放大到车道级地图视野,突出并线引导和目标车道; 过程 2:保持摄像机与自车距离不变,仰角随着自车与路口的距离逐渐减小(即锁定路口在屏幕上的位置)。这样既能有清晰的路口距离感知,又能让路口形状逐渐清楚,规避了大仰角导致的离路口越近,路口形状越扁平的问题。
不同的路口形状适合不同的仰角参数。例如分叉路口用“大仰角”就能既看清路口形状,十字路口则需要偏鸟瞰的“小仰角”才能看清路口形状。另外,当转弯路口之前很近的位置还有一个路口时,还需要调整相机的旋转角度,来清晰传达两个路口的位置和形状,防止驾驶员走错。
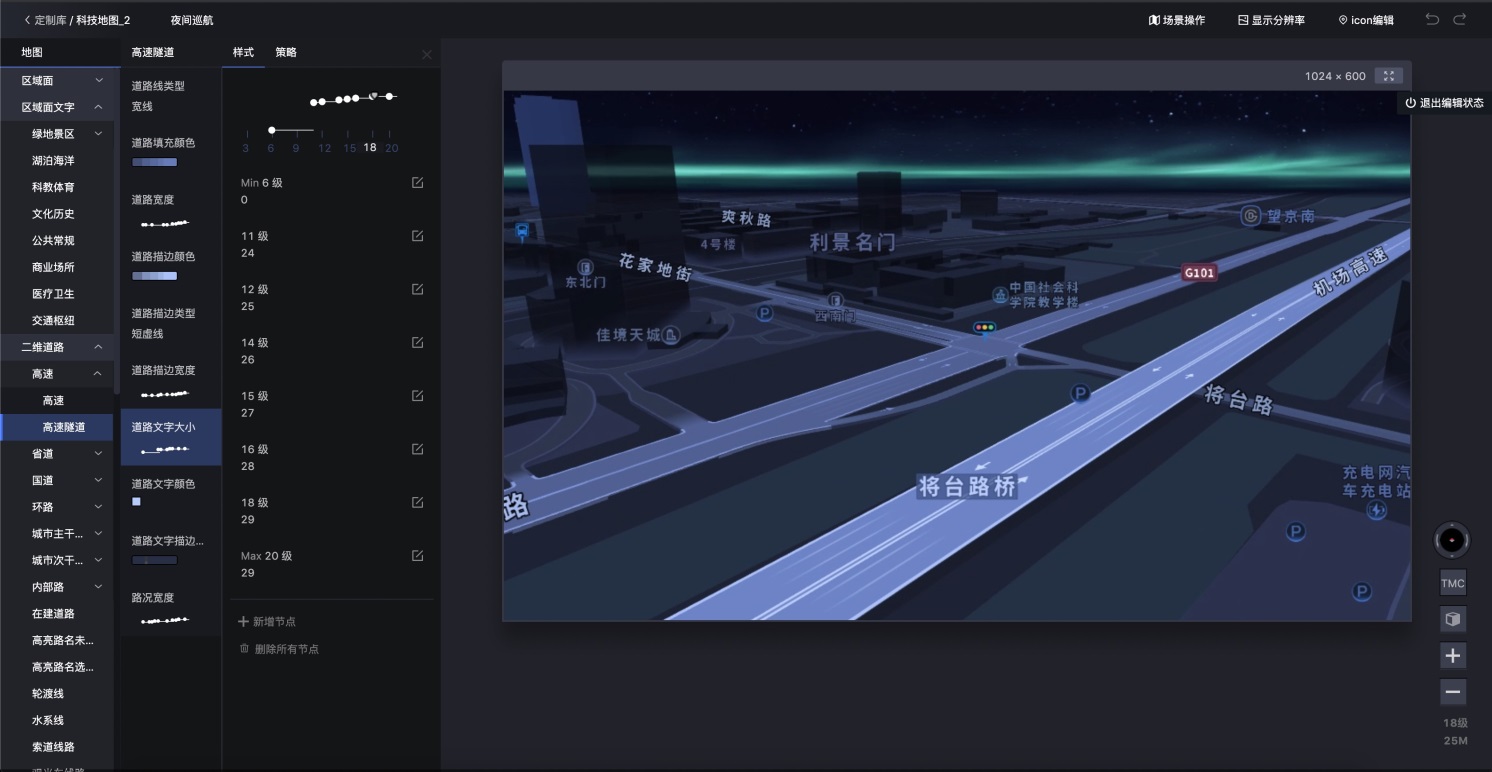
3. 全局样式定制车道级地图与自动驾驶关联紧急,且依赖于车辆的精准定位能力,是车辆智能化的核心功能展示,对于设计上每个车企都会考虑进行深度定制,与自身 HMI 风格统一,且功能上有与其他车企的差异化与卖点,这就需要我们考虑规模化设计中的效率问题。 规模化难点在于,与客户产研设团队的合作链路摸索和优化;车道级元素种类多、状态多,设计产出的落地文件生成方式也不同;预览验证困难,导致新接触的客户设计师理解门槛高,缺乏对应的工具集。 「 低成本风格定制 」 第一阶段,我们为客户提供了各个设计阶段需要的设计规范、源文件、教程。第二阶段,客户可以使用高德设计团队打造的 D-Map 平台,通过所见即所得的方式进行设计方案配置,并且能快速预览设计效果。
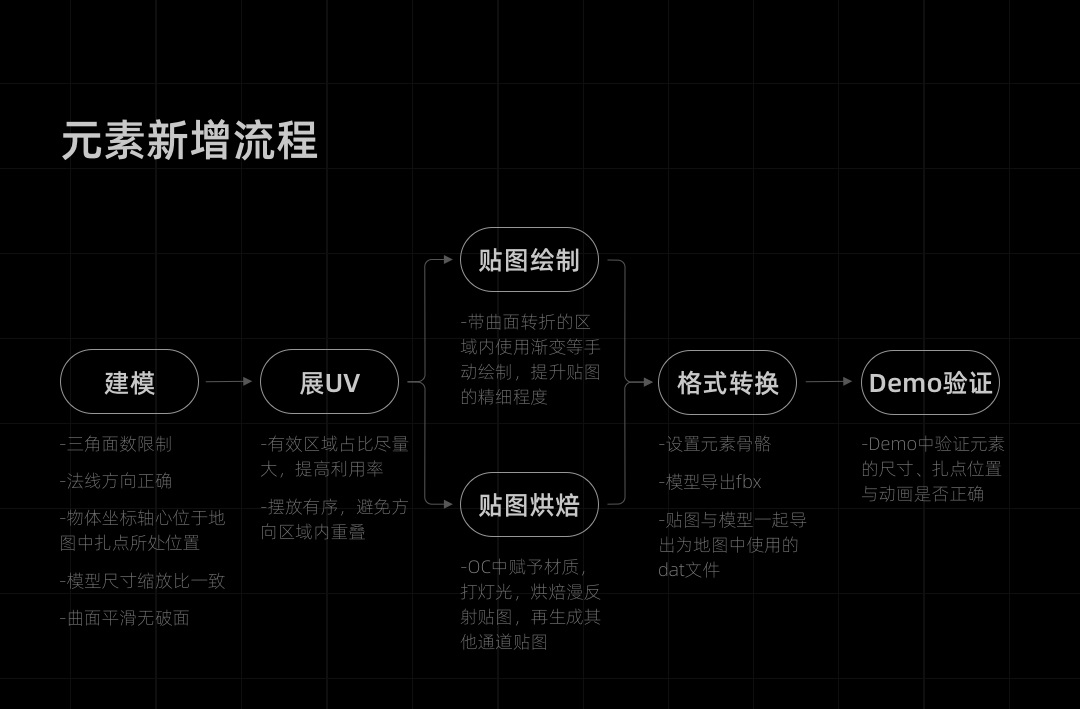
「低成本增减元素」 对于车道级地图中新增三维元素,梳理了对应的元素新增流程,规范前期建模中的模型面数、坐标、法线等,减少返工调整。
总结传统导航地图的使用对象只是人,而车道级导航地图是人车共用的。在自动驾驶时,车道级导航地图不仅为自主驾驶系统提供地图和导航路径,驾驶者与乘客也可以通过地图更清楚地了解车辆做决策的依据,增强对于车辆的信任感;而在人驾驶时,通过车道级的精细引导,可为驾驶员带来更舒适、更安全的导航体验。 地图是人类文明的坐标,随着科技进步,地图不断被赋予新的内涵。对于车道级导航的设计探索才刚开始,未来,我们也会尝试利用不断增强的车载硬件算力,与车企一起创造次世代的车载导航体验,为用户提供更准确好用的高德地图。
欢迎关注作者的微信公众号:「AlibabaDesign」
手机扫一扫,阅读下载更方便˃ʍ˂ |










@版权声明
1、本网站文章、帖子等仅代表作者本人的观点,与本站立场无关。
2、转载或引用本网版权所有之内容须注明“转自(或引自)网”字样,并标明本网网址。
3、本站所有图片和资源来源于用户上传和网络,仅用作展示,如有侵权请联系站长!QQ: 13671295。





最新评论